サービス | ヒトモノ行動認識
ヒトモノ行動認識の特徴
- 人と物を別々に認識
- AIカメラで 移動しているモノと人を検知。
- 検知したデータ(静止画、検知情報)をクラウドに送信。

- 検出型学習
- エリア(ゾーン)を指定することにより、モノや人の様々な行動を検知。

- 異常検知時には通報
- 静止画・動画から人物の骨格を推定。
(人間の関節点を検出)
こんなシーンで活用できます
ヒトモノ行動認識と組み合わせることで移動体と人物を識別し、
人の様々な行動を検知します。

- 踏切内侵入検知
- 踏切のバーが下がった時に接点を入力。
- 踏切内で滞留物/人を検知し、発報する。

- 置き去り検知
- 危険物(置去り物)を検知し、メールで発報。
- 発報時間の映像から置去りした人物を迅速に特定。

- 危険エリア侵入検知
- 危険エリアを指定。
- 侵入/滞留を検知し パトランプ鳴動。
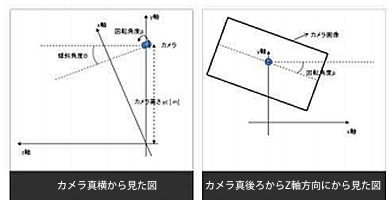
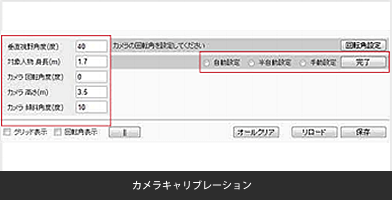
カメラキャリブレーション
設置時のカメラパラメータは、カメラ高さ、傾斜角度、回転角度、レンズ画角があります。
それぞれのパラメータがわかっている場合は直接入力にて設定が可能ですが、カメラ高さと傾斜角度は、あらかじめ身長(高さ)のわかっている人物等の画面上の位置での見え方により、自動で計測することも可能です。
測定には、自動、半自動、手動による3種類の方法があります。
基本性能
- ■ 人物を対象とする場合、日照条件によっては影の影響を見込んで設定することが必要です。
(下側に影が伸びる状況では、影の下端が判定位置となる。) - ■ 画面内の動体の検出に要する時間は約1秒であり、比較的高速で移動する対象の場合画角を調整する必要がある。
(画面内に映る→検知領域へ進入が1秒以内であれば、進入イベントが検出できない。)
| 項目名 | 内容 | 要件 |
|---|---|---|
| 存在 | 多角形・多角線・フェンスに対して、検知対象が存在している場合にイベントが発生します。 | 判定に5フレーム(約350ms)が必要であり、存在の状態が継続されること。 |
| 進入・進出 | 多角形に対して、以下の場合にイベントが発生します。
|
判定に5フレーム(約350ms)が必要であり、進入・進出の状態が継続されること。 |
| 方向指定検知 | 多角線上を指定角度で検知対象が移動した場合にイベントが発生します。 | 特になし。 |
| フェンスよじ登り・乗り越え | フェンスに対して、検知対象がよじ登り・乗り越えを行った場合にイベントが発生します。 | フェンス高さは画面上で30ピクセル以上であること。 |
| 置き去り・持ち去り | 多角形に対して、検知対象が以下の場合にイベントが発生します。
|
検知対象は高さ幅が30ピクセル以上であること。 |